Right Triangles
General Definitions/Formulas
Types of Graphs
Vectors/Scalars
100
What are the names of the three trig functions?
Sine, Cosine, Tangent
100
Define S.I. units (in your own words is fine)
S.I. units stand for "Systeme Internationales". These are the units generally used internationally by all scientists as an internationally understood language of math.
100
What goes on each axis of a position vs. time graph?
y axis - position
x axis - time
100
What is the difference between a scalar and a vector quantity?
A scalar quantity only has magnitude while vectors have magnitude and direction.
200
How do we solve for a missing ANGLE? (inverse or regular)
Inverse Trig
200
Define speed.
An object's total distance per unit of time.
200
How do you solve for the AVERAGE SPEED of an object using a position vs. time graph?
Solve for the total distance and divide by the total time.
200
Which of the following is a scalar quantity?
Time or displacement
Time
300
What is the name of the theorem we use to solve for a missing side of a triangle (assuming we have two sides)?
Pythagorean Theorem
300
Give the formula for the Pythagorean Theorem.
a2 + b2 = c2
300
What is the slope equation? (BONUS: What does it tell you about an object's motion on a position vs. time graph?)
y2 - y1/ x2 - x1
BONUS: it tells you the velocity.
300
Which of the following is a vector quantity?
Speed or Velocity
Velocity
400
What does SOH CAH TOA stand for? (state the functions)
sine = opposite/hypotenuse
cosine = adjacent/hypotenuse
tangent = opposite/adjacent
400
What is the formula for velocity AND what are the S.I. units?
Displacement / Time (m/s)
400
What is the difference between an INSTANTANEOUS velocity and an AVERAGE velocity?
Instantaneous velocity means the velocity at a specific moment in time (i.e. the velocity at 2 seconds)
Average velocity means the overall velocity which is found by taking the displacement/time.
400
Add the vectors below:
---------> + <-----------------------------
10 49
<--------------------------
39
500
Solve for the missing side using trig.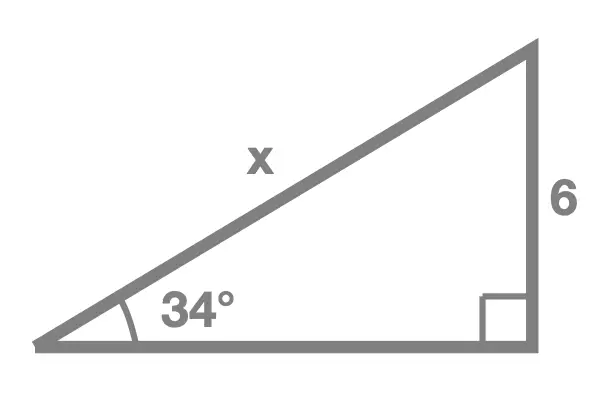
10.73
500
Define acceleration. Give its S.I. units.
The change in an object's velocity over time. (m/s2)
500
Solve for the instantaneous velocity of the object at 4 seconds. 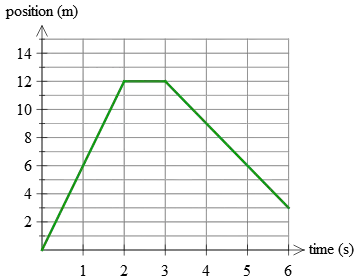
using points (0,0) and (1,6)
6-0 / 1-0 = 6/1 = 6m/s
500
List the steps to add perpendicular vectors.
1. Tail-to-tip method
2. Pythagorean Theorem
3. Inverse Trigonometry