Multiple Choice (hard)
Multiple Choice (Impossible)
General VEX
General Coding
100
What building on the Castle Crasher Playground will be the THIRD knocked over according to this project?
1 3 4 5

4
100
What is NOT necessary to create a working project?
a.Adding blocks into the project randomly.
b.Sequencing commands in the correct order.
c.Using the correct commands.
d.Accurate parameters and values in commands.
a.Adding blocks into the project randomly.
100
A programming language is a spoken language used to communicate with the VR Robot.
True
False
True
100
Where a set of Vex rules show symbols representing actions.
Vex Programming
200
Which block turns the VR Robot to a given clockwise heading?
A.[Turn to heading]
B.[Turn]
C.[Set drive rotation]
D.[Turn to rotation]
[Turn to heading]
200
What types of values can the [Turn to heading] block NOT accept as parameters?
a.Numeric valuesb.Decimals
c.Words or text
d.Integers
c.Words or text
200
What is a behavior?
An action performed by the robot.
200
The programming blocks used to change a robot's behavior.
Commands
300
How will the VR Robot move based off of this command?
A.Turn left 80 degrees.
B.Turn right 80 degrees.
C.Turn left 90 degrees.
D.Turn right 90 degrees.
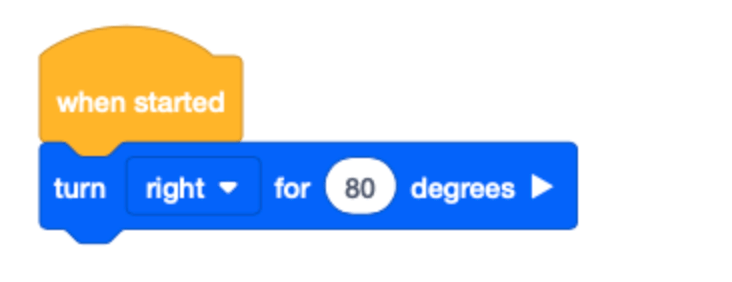
Turn right 80 degrees.
300
Which of the following is the best description of the [Turn for] block?
A.Turns the VR Robot left indefinitely.
B.Turns the VR Robot right indefinitely.
C.Moves the VR Robot forward a specific distance.
D.Turns the VR Robot left or right a specific amount of degrees.
D.Turns the VR Robot left or right a specific amount of degrees.
300
A user can change the behavior of a robot by changing the commands.
True
False
True
300
Whole numbers (no decimal places)
Integers
400
What part of the block do you select to change the direction of the [Drive for] block?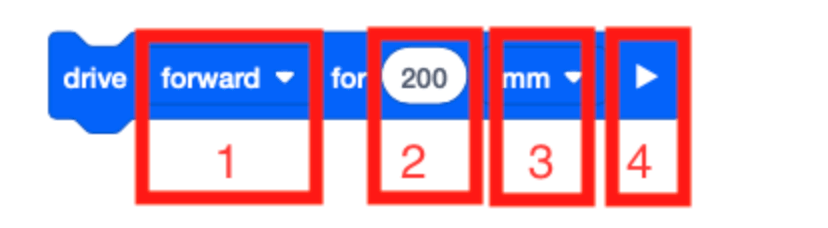
2
3
4
1
400
What is the range of values used when setting velocity?
A.0% to 100%
B.-100% to 100%
C.0% to 200%
D.-100% to 200%
A.0% to 100%
400
Which of the following is the best description of the [Drive for] block?
Moves the VR Robot forward or backwards a specific distance.
400
The robot sensor that measures the distance between the front of the Sensor and an object in front of it.
Distance sensor
500
How far will the VR Robot move based off of this command?
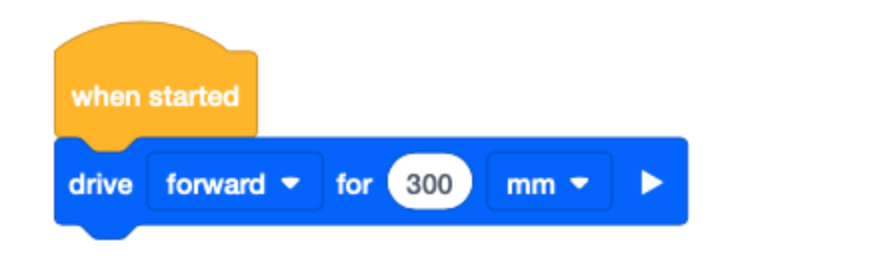
B.400mm
C.500mm
D.300mm
300mm
500
Which block is used to change the speed of the drivetrain?
A.[Set turn velocity]
B.[Set drive velocity]
C.[Set drive heading]
D.[Set drive rotation]
B.[Set drive velocity]
500
How can you make the VR Robot move in reverse on the [Drive for] block?
Changing the "forward" parameter to "reverse".
500
Data that can be changed
Variable