Conceptos básicos I
Representaciónes I
Representaciones II
Álgebra Lineal I
Cinemática
Dinámica
Conceptos Básicos II
100
¿Cuántos y cuáles son los tipos de movimiento que hay?
Dos: Rotación y Traslación
100
De manera general, cuántas matrices de rotación existen para describir rotaciones en 2D
1
100
¿Cuáles son las 3 matrices de rotación fundamentales que describen rotaciones en tres dimensiones?
R_x(\theta)=[[1,0,0],[0,cos(\theta),-sin(\theta)],[0,sin(\theta),cos(\theta)]]
R_y(\theta)=[[cos(\theta),0,sin(\theta)],[0,1,0],[-sin(\theta),0,cos(\theta)]]
R_z(\theta)=[[cos(\theta),-sin(\theta),0],[sin(\theta),cos(\theta),0],[0,0,1]]
100
En robótica, cuál es la interpretación más útil de una matriz
Una transformación de espacios
100
¿Qué es un twist y cuáles son sus unidades en el SI?
Un vector extendido de velocidad que concatena la velocidad linear y la angular. Su unidad es dual m/s y rad/s
100
¿Cuál es la diferencia entre un referencial inercial y uno no inercial?
En un sistema inercial los análisis dinámicos se pueden calcular usando únicamente fuerzas reales (no ficticias). Un sistema lineal no presenta aceleraciones.
100
¿Cuáles tipos de articulaciones se estudian en robótica y por qué no más?
-Prismática (traslacional) y revoluta (rotacional)
-Cualquier otra articulación se puede descomponer como una combinación de esas dos
200
¿Cuáles son los 3 espacios más usados en robótica para clasificar acciones?
-Espacio de trabajo (Workspace)
-Espacio de la tarea (Task Space)
-Espacio de configuración (Configuratoin Space)
200
¿Por qué se utiliza la matriz de rotación para representar la orientación de un objeto y no sólo un ángulo?
En 3D, los 3 DoF de rotación hacen imposible codificar la rotación con un solo ángulo
200
Tomando en cuenta que la matriz de rotación describe como está orientado un sistema referencial (Σ1) con respecto a otro (Σ0), ¿cómo se construye la matriz de rotación usando la información de Σ1?
Se concatenan los vectores unitarios de los ejes principales descritos en términos del referencial Σ0
R_1^0=[[x_1^0, y_1^0 ]]
R_1^0=[[x_1^0, y_1^0 ,z_1^0]]
200
¿Cuál es la aplicación más común de una matriz antisimétrica en robótica?
Representar el producto cruz de manera matricial
200
¿Cuál es el problema más común que encontraremos cuándo resolvamos análisis de cinemática inversa?
Es muy posible que se tengan múltiples soluciones o no solución
200
¿Cuál(es) es(son) la(s) ecuación(es) de Newton-Euler?
\sum\vecF=m \veca
\sum\vecM=I\vec\alpha+\vec\omega\timesI\vec\omega
200
Define los conceptos posición, orientación y pose
Posición: Vector de parámetros que identifican la ubicación de un punto (usualmente el CoM) en un espacio 3D
Orientación: Vector de parámetros que identifica la inclinación de un cuerpo con respecto a un sistema coordenado 3D
Pose: Vector concatenado de Posición y Orientación
300
Qué significa
SO(n)
y qué propiedades tiene
Grupo de matrices ortogonales especiales. Cumplen con tener determinante 1 y que la inversa es igual a la transpuesta
300
¿Cuál es el nombre de la parametrización de orientación más común que evita singularidades?
Cuaterniones (Quaternions)
300
¿Cuál es la ventaja de usar las matrices de transformación homogénea cuándo se hace cinemática de cuerpo rígido?
Permite escribir la transformación como una cadena de multiplicaciones (no multiplicaciones y sumas), lo que simplifica la notación y facilita la implementación en software.
300
¿Qué interpretación geométrica se le puede dar a una matriz cuya determinante es cero?
Que la matriz transforma un espacio a otro de menor dimensión
300
¿Qué es la matriz Jacobiana y cuál es su dimensión?
Es la matriz que mapea las velocidades generalizadas a las velocidad en el espacio de la tarea.
Su dimensión es n x m, donde n es el número de grados de libertad en el espacio y m el numero de coordenadas generalizadas.
300
En las ecuaciones de Newton-Euler la parte de Newton se hace en un tipo de sistema referencial, mientras que la de Euler en otro tipo. ¿Cuáles son esos tipos de sistema referencial?
Newton: Inercial
Euler: No inercial
300
¿Qué significan
SO(3) y SE(3)
, y qué representan?
SO(3): Espacio ortogonal especial de orden 3. Espacio dónde existen las matrices de rotación.
SE(3): Espacio euclidiano especial de orden 3. Espacio dónde existen las matrices de transformación homogénea.
400
¿Qué es una cadena cinemática y cuántos tipos hay?
Conjuntos de cuerpos rígidos unidos por articulaciones mecánicas que representan un mecanismo.
Serial, Paralela y Arborescente
400
¿Qué criterio se utiliza para saber si se tiene que usar rotaciones intrínsecas o extrínsecas en composición de rotaciones?
Extrínsecas: rotaciones en el mundo (Pre)
Intrínseca: rotaciones en el referencial local (Post)
400
¿Cuál es el número mínimo de parámetros que tiene que tener el vector de pose para evitar singularidades de representación?
Siete
400
¿Cuál es la relación entre la determinante de una matriz y la determinante de su inversa?
|A^{-1}|=1/{|A|}
400
Considerando que las longitudes de cada eslabón son unitarias, determina la cinemática directa del robot
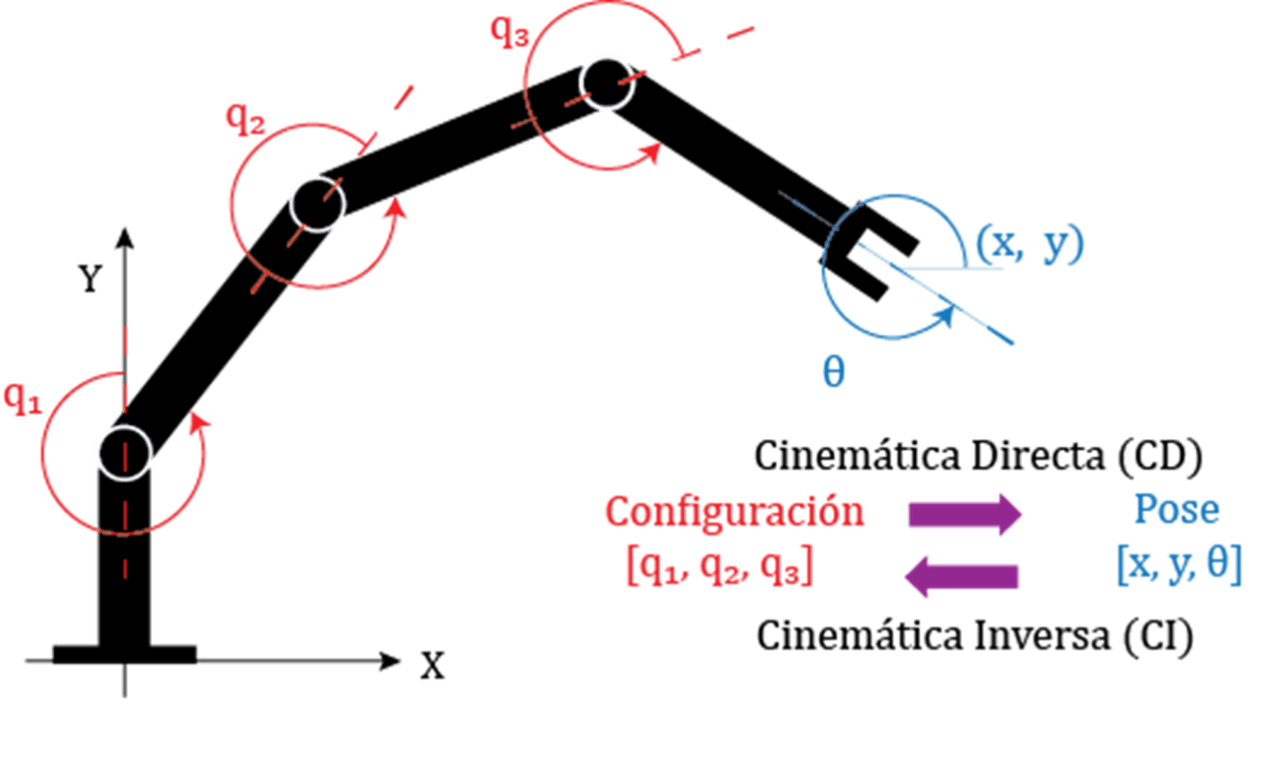
[[x],[y],[\theta]]=[[cos(q_1)+cos(q_1+q_2)+cos(q_1+q_2+q2)],[1+sin(q_1)+sin(q_1+q_2)+sin(q_1+q_2+q2)],[q_1+q_2+q_3]]
400
¿Cuál(es) es(son) la(s) ecuación(es) de Euler-Lagrange Generalizada?
{\deltaL}/{\deltaq}-d/{dt}{\deltaL}/{\delta\dotq}=\tau
400
¿Qué son las coordenadas generalizadas?
Son el conjunto mínimo de valores que parametrizan de manera ÚNICA la configuración de un robot.
500
¿Qué es una singularidad de configuración?
Indeterminación matemática que se presenta cuándo el robot alinea al menos dos ejes actuados, lo cuál hace imposible la cinemática inversa
500
¿Cuántas posibles interpretaciones tiene una combinación de ángulos de Euler? Ejemplifique con los ángulos ZYX
4
[[x->y->z],[z'->y'->x'],[y->x'->z],[y->z->x']]
500
Las 12 combinaciones de ángulos de Euler son:
[[XYX,XYZ,XZX,XZY],[YXY,YXZ,YZY,YZX],[ZXY,ZXZ,ZYX,ZYZ]]
Explica por qué combinaciones como YYZ no están incluidas.
Porque rotaciones consecutivas como YY no agregan más información. YYZ es equivalente simplemente a YZ
500
¿Qué características tiene que tener una matriz para que se pueda invertir?
Ser cuadrada, y no singular
500
¿Qué es la elipse de manipulabilidad?
Una representación gráfica que muestra la capacidad del robot de desplazarse en determinadas direcciones
500
¿Cuál es la diferencia entre Newton-Euler y Euler-Lagrange Generalizado?
NE se resuelve en el espacio de la tarea y analiza todas las fuerzas del sistema.
EL se resuelve en el espacio de configuración y solo es considera aquellas fuerzas que generan trabajo.
500
¿Qué es una singularidad de representación?
Indeterminación matemática que se presenta cuando el robot entra en una posición en la que no existe una representación única debido a los parámetros que se están usando.