Energy
Code
Hardware
Miscellaneous
100
What is potential/kinetic energy measured in?
Joules
100

What number would you put in the first box to make the robot turn 90 degrees?
50
100
Name the 3 sensors.
Color, Distance, Force
100
Is the variable "flavor" qualitative or quantitative?
Qualitative
200
What is the formula for velocity?
Distance/Time
200
Name at least 2 methods used to create/debug code.
Look at old code.
Test code in sections.
200
Name the 3 types of hardware and what part of the human body they are similar to.
Large Hub - the brain
Sensors - the senses
Motors - the muscles
200
What is the difference between a robot and a machine?
A robot can operate independently
300
What is Earth's gravitational constant?
9.81 m/s²
300
List 3 reasons why code should be optimized.
It's easier to read.
It's easier to debug.
The program will run faster.
300
What does the large hub do?
Receives and processes information, powers the robot, connects the sensors and motors
300
What are the four D's?
Dull, Dangerous, Delicate, Dirty
400
What is the formula for potential energy?
m x g x h
400

What is missing from/wrong with this code?
The motor assignment block
400
What is the length of one motor rotation?
17.5 cm
400
What is cloud data?
Information that is stored in remote servers.
500
What is the formula for kinetic energy?
½ x m x v²
500
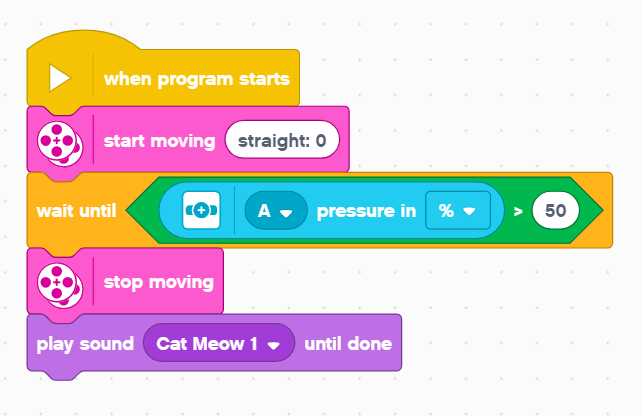 What does this code do?
What does this code do?
The robot moves forward. When the force sensor hits something, it stops and plays a cat meow sound.
500
Hardware is one of the 3 components that make up a robot. What are the other 2? Bonus points if you can tell me what they do.
Software is the code that tells the robot what to do.
Firmware is the code that helps the software and hardware work together.
500
What do I study in college?
Video Game Design